|
We are involved in many economic and societal stakes. Some of them are presented here. Don't hesitate to contact us for your new challenges. |
|
Smart Energy

|
Like robotics, Ambient Intelligence (AmI) is a paradigm with significant industrial and technological challenges, and a major challenge for AI. In this context, we address the problem of priming sensorimotor learning. From a constructivist point of view, learning is initially based on the agent's acquisition of sensorimotor motives from his own experience. This step is particularly difficult to implement for real systems, continuous and heterogeneous, from raw data alone and without prior modeling. To answer this problem, the team uses decentralized models of constructivist learning for an ambient intelligence system based on a multi-agent architecture. |
The common goal of these different models is to create intelligent agents that are highly autonomous because they have the capacity to adapt to their environment and even to learn, just like biological organisms. Potential applications concern systems interacting with a complex environment, whose objectives are varied and not predefined.
Linked projects:
Ubiant project
SmartGrid project
Linked projects:
Ubiant project
SmartGrid project
Multi-robots systems

Here we are interested in the interactions in systems composed of a set of artificial agents (ex.: multi-robot systems) or human-robot systems.
We specifically focus on the collaborative decision process under uncertainty, in such environment.
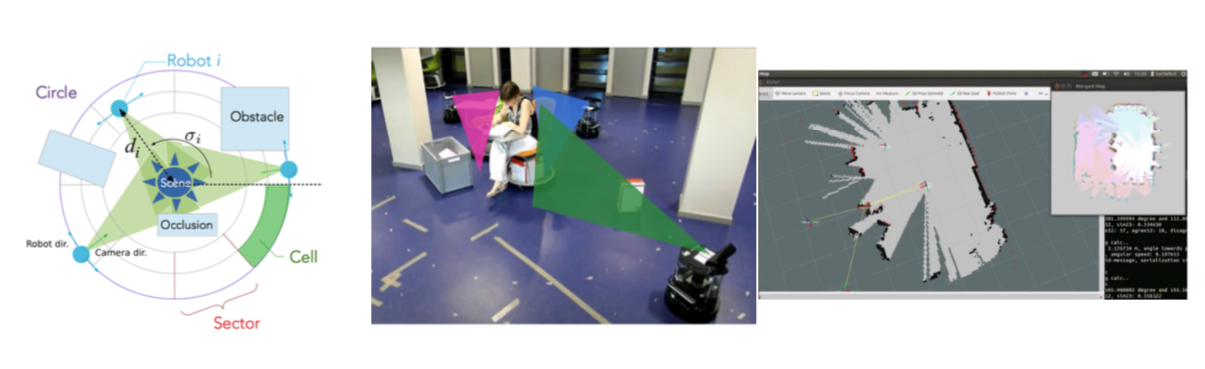
Photos illustrate the positioning problem a fleet
of mobile robots around a scene.
Linked projects:
COMODYS
We specifically focus on the collaborative decision process under uncertainty, in such environment.
Photos illustrate the positioning problem a fleet
of mobile robots around a scene.
Linked projects:
COMODYS
Smart Cities
Future smart cities are unlikely to look that much different, but they are destined to interact differently with their human inhabitants.
Partners from different areas, especially public and private actors, will much more cooperate in the future and their coordination process will adapt frequently.
Hence our research focuses on smart mobility and smart governance.
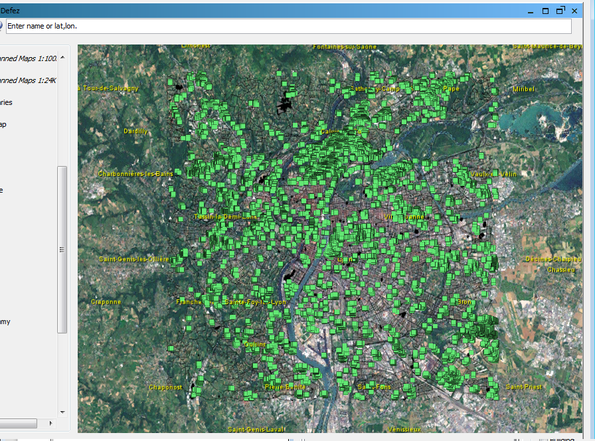
Designing a policy is a demanding process which requires both time and money with no warranty of its efficiency. One of the many problems policy makers have to face is gathering relevant data about needs of day-to-day users. This issue is even harder to address when human diversity is taken into account. Because humans do not have the same expectations regarding public transportation system, even a lot of data does not overcome this issue easily. Moreover analysis of the city macroscopic patterns does not allow policies makers to apprehend subtle interactions among users.
To override the problem of microscopic details, the use of an agent based approach seems to be relevant. An agent based simulation represents each agent as a set of unique personality traits to provide more depth on individual behavior.
Given the diversity of humans expectations, this solution renders a rich and diverse representation of city users allowing analysis of both emergent microscopic decisions and global policies impacts on each element of this simulation.
Linked projects:
SmartGov
Partners from different areas, especially public and private actors, will much more cooperate in the future and their coordination process will adapt frequently.
Hence our research focuses on smart mobility and smart governance.
Designing a policy is a demanding process which requires both time and money with no warranty of its efficiency. One of the many problems policy makers have to face is gathering relevant data about needs of day-to-day users. This issue is even harder to address when human diversity is taken into account. Because humans do not have the same expectations regarding public transportation system, even a lot of data does not overcome this issue easily. Moreover analysis of the city macroscopic patterns does not allow policies makers to apprehend subtle interactions among users.
To override the problem of microscopic details, the use of an agent based approach seems to be relevant. An agent based simulation represents each agent as a set of unique personality traits to provide more depth on individual behavior.
Given the diversity of humans expectations, this solution renders a rich and diverse representation of city users allowing analysis of both emergent microscopic decisions and global policies impacts on each element of this simulation.
Linked projects:
SmartGov
Social Robotics and Multi-Sensory Human Robot Interaction

Social robots play the role of social interaction. Domestic humanoid robots can be used by elderly and immobilized residents to keep them company. They act as a care taker. Home-telepresence robots can move around in a remote location and let one communicate with people there via its camera, speaker, and microphone. Through other remote-controlled telepresence robots, the user can visit a distant location and explore it as if they were physically present. These robots can, among other applications, permit health-care workers to monitor patients or allow children who are homebound because of injuries, illnesses, or other physical challenges to attend school remotely. Other social robots are welcome robots, they interact with clients arriving in a shop, tourist place, or for an specific event, and drive them for the first steps. Such robots can also be used to survey clients when they leave the place. Linked projects: Behaviors.AI |
Multimodal perception describes how artificial agents form coherent, valid, and robust perception by processing sensory stimuli from various modalities. It has been widely studied for humans in cognitive science, behavioural science and neuroscience. This conducts to problems about the correct acquisition and fusion of data for one artificial agent, as well as for several robots.
Linked projects: Amplifier Project 
|
