Human-Robot Interaction & Coordination

Our focus of interest here is the modelling of groups of artificial agents operating in a dynamic, distributed and constrained resource environment to coordinate and make rational decisions to achieve their goals.
We are working for instance on the development of key support systems for service robotics (domestic work or caring for dependent people), as well as social robotics and multi-sensorial human robot interactions.
Learn more...
Autonomous Agents & Self-* Systems
Self-Organization, Self-Adaptation
The focus of this axis concerns the design of self-* approaches for complex problems. The goal is to provide an endogenous control in dynamic and decentralized systems.
In addition, we are interested in the development of participative methods combining multi-agent simulation and learning methods, for complex socio-technical systems.
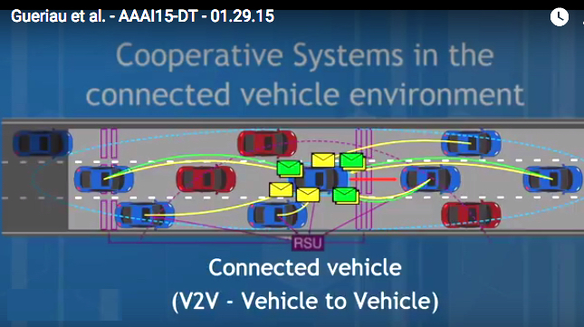
For instance, we work on self-adaptation of urban policies, self-regulation of intelligent highway traffic (photo), self-regulation of power consumption on SmartGrid, etc.
Learn more...
The focus of this axis concerns the design of self-* approaches for complex problems. The goal is to provide an endogenous control in dynamic and decentralized systems.
In addition, we are interested in the development of participative methods combining multi-agent simulation and learning methods, for complex socio-technical systems.
For instance, we work on self-adaptation of urban policies, self-regulation of intelligent highway traffic (photo), self-regulation of power consumption on SmartGrid, etc.
Learn more...
Multi-Agent Learning
|
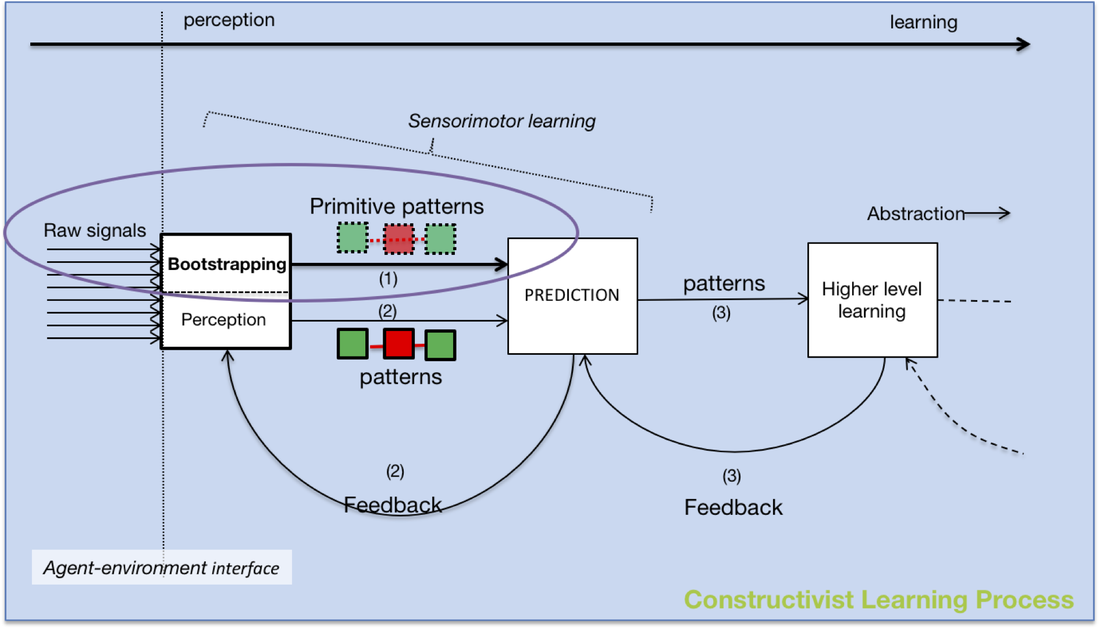
WeThe learning aspect of the artificial agent is declined in two parts.
Based on the team members' experience, we propose many constructivist approaches to model cognition and the emergence of meaning, for what is called developmental learning. The constructivist approach is a promising route for going beyond the limits of classical techniques stemming from cognitivism or connectionism. Neighbour currents such as: Incarnated AI, Enactive AI, Developmental Robotics are being studied more and more. Reinforcement learning methods succeed when the agents, reward policy, and action space are all well-defined and scalable. When the action space becomes intractably large (eg. all the possible moves for all vehicles), multi-agent reinforcement learning may be preferred. Here we explore multi-agent reinforcement learning and Deep Learning approaches of Markovian Decison Processes (MDP). For example prior to the hurricane AlphaGo, we have enhanced MARLs using MCTS (Monte Carlo Tree Search) for the Go game with interesting results (here) SmartGrid research: Learn more... Smart governance: local agent learning in a cluster using Independant-Q Learning with a new algorithm, the Cluster-Deep Q-Learning. Learn more... |

|
